 教室検索
教室検索




テーマパフォーマンス部門は、ロボプロ専用キットを使用して製作したロボットを、プログラムにより自立制御された状態にして、規定のフィールド内でテーマに即した内容を表現する競技です。
今回のテーマは『スポーツ』です。
テーマパフォーマンス部門 結果発表

最優秀賞

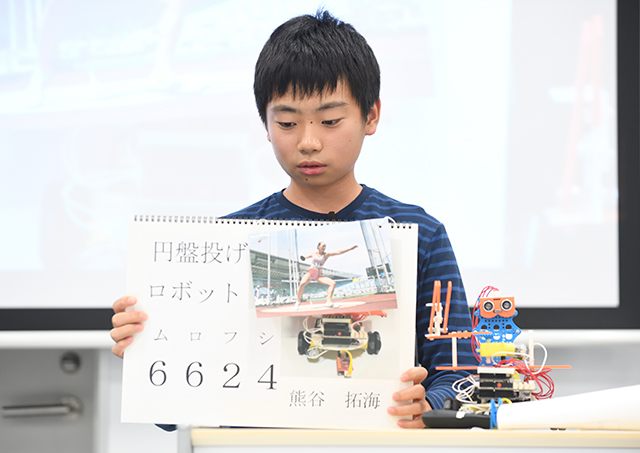
岐阜県 西可児教室 熊谷 拓海君(小6)
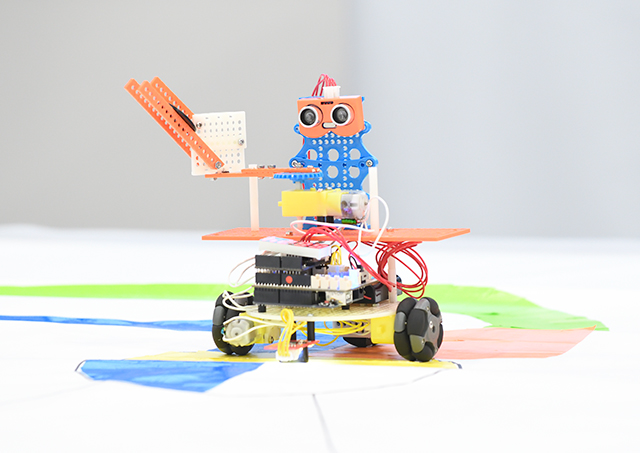
作品名「6624(ムロフシ)」
作品のポイント
2020年東京オリンピックの陸上競技種目の円盤投げをイメージしてロボットを作りました。
ロボットの名前はハンマー投げの室伏選手からヒントを得て6624と名付けました。特徴は投げる前に腕を引き、体を回転させて円盤を遠くへ飛ばす工夫をしたことです。そのため3つあるモーターのうち1つを腕を動かすために使い、残りのモーターで前後と回転の動きのプログラムを組みました。
また、エリア内に円盤が飛ぶように本体の回転スピードや投げるタイミングのプログラムを何度も組みなおしました。
形ができてから、真っ直ぐ飛ばすことができるようになるまで、多いときで1日6時間調整して1週間かかりました。
古田先生のコメント
このロボットのすごいところは2つ!
1つ目は、カラーセンサーで地面の色を読み取って動いていところです。
もともとロボットに動きをプログラムし、回転させて円盤を飛ばそうとすると、なかなかまっすぐ飛びません。最初のセットの位置がずれたり、回転中にタイヤがスリップしてもずれてしまいます。
しかし、このロボットは地面の色を読み取り、色に合わせて動作するように作られています。なので、物を投げるタイミングや位置がズレることがない。だからまっすぐ飛ばすことができるんですね。
2つ目は、距離センサーの使い方です。
飛んだ距離を測るとあっさり言いますが、センサーで測ってもなんだか分からない数値が出てくるだけで、何センチか分かりません。事前にその数値と実際の距離の対応付けを地道に行っています。これは専門用語でいうと「キャリブレーション」というものです。センサーのキャリブレーションは大学生レベルです!(大学生でもできないかも)
これは恐れ入りました!素晴らしい!
また、簡単に体をひねって飛ばしているように見えますが、タイミングと速度をリリース時に最大化させています。それをビデオを見ながら解析して分析したのがすごいです。おもちゃとして製品化できそうですね!

ヒューマン特別賞
東京都 日野豊田教室 藤澤 駿太君(中1)
作品名「シュート君」
作品のポイント
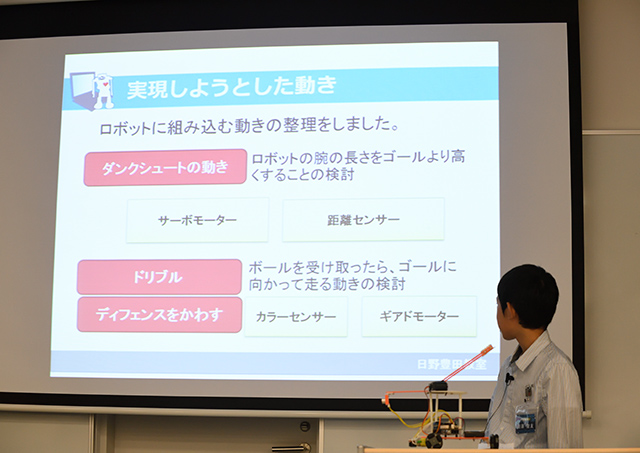
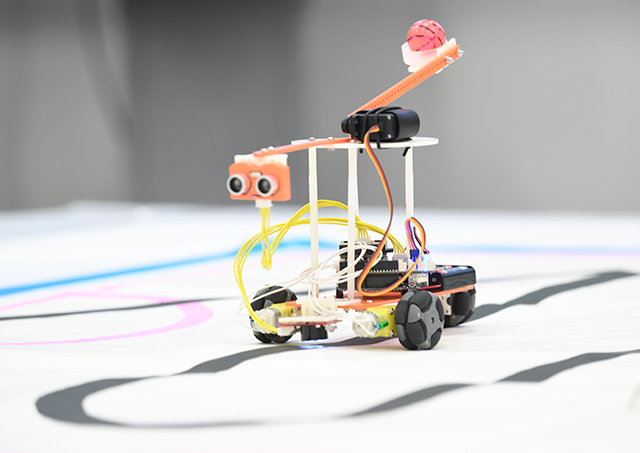
バスケ部で練習をしている時にダンクシュートをしてみたいと思い、ロボットにこの夢をたくす事にしました。カラーセンサーを使ってライントレースを行い、ディフェンスをかわしながらゴールを目指します。
ゴール前では距離センサーを使ってマシンとゴールとの距離を測り、適切な距離でシュートを打てるように何度もプログラムを調整しました。また、シュートが決まるように腕の長さと高さも試行錯誤して、今の形になりました。
古田先生のコメント
彼は、小道具・大道具と演出が素晴らしいです!
ドリブルで3人のディフェンスをかわしてかわして…最後に豪快にダンクを決める!という演出がとても良いです。
ちゃんと、距離センサーにかぶらない大きさで小道具を作成していますね。
パフォーマンス的に"魅せてくれる"発表でした。楽しかったです!ありがとうございました!
テーマパフォーマンス部門 出場者のご紹介
東京都 みなみ野教室 大西 航君(中1)
作品名
「バイク型ロボット(モータースポーツ)」
作品のポイント
僕は「バイク型ロボット」を作りました。
特徴
・前と後ろについたタイヤで走ること
・坂道を上ることが出来ること
・段差を下りることができること
工夫した点
・前輪を2つつなげてバランスを取ったこと
・モーターの数を3つにして、坂道を上る際のパワー不足を解消したこと
東京都 中野教室 川奈部 和音君(中3)
作品名「Mr. Endless Darts」
作品のポイント
僕が作ったロボットは、ダーツロボ「Mr. Endless Darts」です。
アームロボットが矢を投げます。投げた際に音が鳴り、当たったことを知らせてくれます。
その後、投げた矢は回収され、再び投げることができます。
もっとも大変だったのは矢の回収で、最初は的の上の方に当たった矢がうまく回収できませんでした。
そこで、アームを下げるタイミングとグリップを閉じるタイミングを同時にすることで、的の上の方に当たった矢も回収しやすくなりました。
東京都 中野教室 野口 幸聖君(中2)
作品名「ベースボールロボ 」
作品のポイント
ベースボールマシンは、超音波センサーでボールを検知すると、回転してボールを打ちます。
ボールを打ったら、LEDでHITの文字を表示させます。打った後は、一塁、二塁、三塁をまわって、ホームベースまで自動で帰ってくるようにプログラムしました。
最初にセッティングする位置やわずかな角度の差が生じただけで、ベースをまわってくれなかったりするので、微調整に大変苦労しました。また、教室と同じ環境を本番でも再現できるか、とても不安でしたが、うまくできるよう精一杯頑張りました。
東京都 南大沢教室 三樹 拓弥君(高1)
作品名「羽生ホイールⅡ」
作品のポイント
今回、私が製作したロボットのテーマは、フィギュアスケートです。
このロボットの特徴は、オムニホイールロボットの上に、二足歩行ロボットの上半身が乗っているということです。これにより、人に近い動きが可能になりました。
さらに今回は、腕のプログラムを組み込むことで、表現力の向上に繋がりました。工夫した点は、タイヤのプログラムと、腕のプログラムを同時に機能させるということです。製作には時間がかかりましたが、それなりに良いロボットが作れたと思います。
