教室検索
教室検索












日本を代表する
ロボット研究・開発者、
古田貴之先生が監修
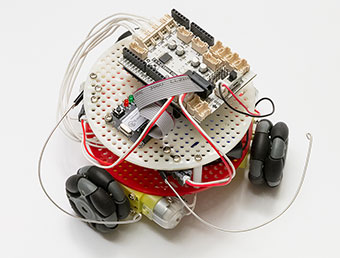
ロボプロでは、開講当初から、授業で使うすべてを、古田先生の全面監修の元、千葉工業大学の未来ロボット技術研究センター(fuRo)との共同開発でつくりあげています。エレクトロニクス、機械工学、人工知能、プログラムなど、ロボットの研究開発に欠かせないあらゆる専門家が、日本の将来を担う子どもたちのために、との想いを注ぎ込んだ教材類は、他に類を見ない完成度と充実度を誇ります。