
ライントレース部門は、オレンジ・グリーン・ブルー・マゼンタの4色のラインが引かれたコースを、カラーセンサーを搭載したロボットで読み取りながら自律走行させるスピード競技です。
4色のカラーラインを使うことによって、一般的な単色のコースより高度になっています。
カーブやクランクなど変化の多いラインに対応できるようにセンサー位置や角度を調整するロボット製作テクニックと、ラインの色によって速度や移動方向を調整するプログラミング力が試されます。
午前のタイムトライアルはスピード重視の設定、午後は完走することを重視した設定にするなど、選手の調整力が試され、白熱した戦いとなりました!
ライントレース部門 出場者のご紹介
-
東京都 江戸川大杉教室
内田 悠翔さん

-
大阪府 狭山池前教室
宇津 凌さん

-
茨城県 守谷テラス教室
坂本 明香音さん

-
愛知県 国府教室
白川 真大さん

-
愛知県 国府教室
戸田 有哉さん

-
東京都 東陽町教室
中 良介さん

-
東京都 東陽町教室
中島 智畝さん

-
愛知県 東山公園教室
増田 湊斗さん

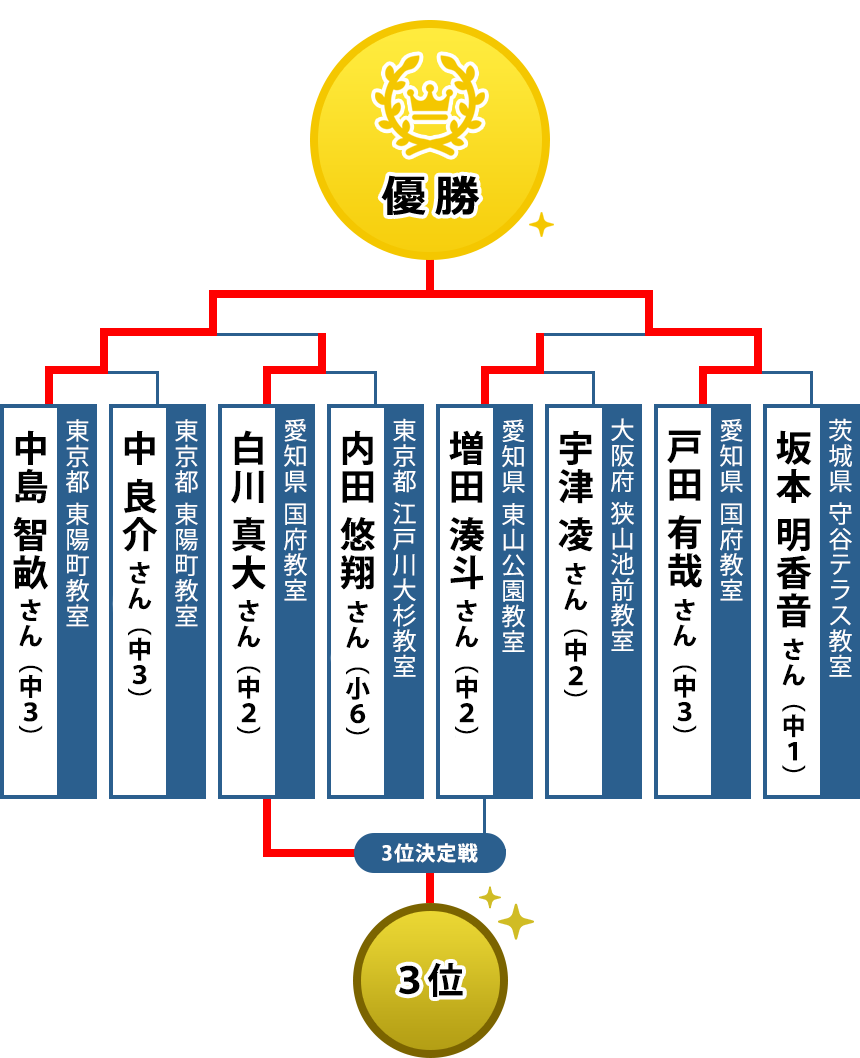
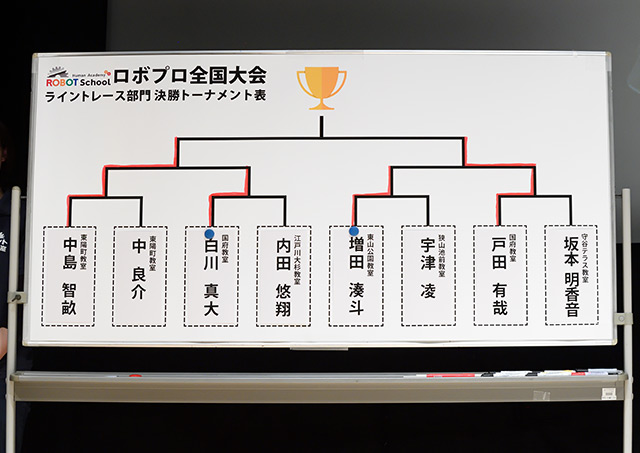
ライントレース部門 トーナメント表
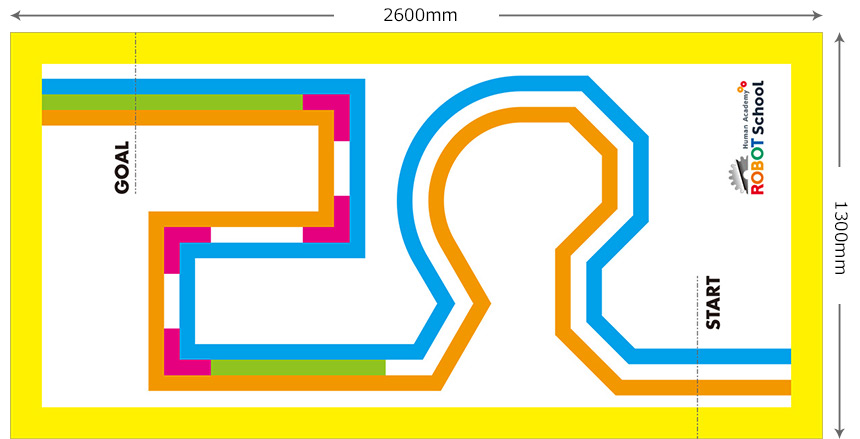
走行コース・競技ルール
特徴
今大会のコースはゴール手前に直角クランクが4ヶ所組まれており、難易度の高いコースでした。タイムトライアルではラインアウトが続出しましたが、昼休みで調整を行い、午後のトーナメント戦では完走率が上がりました。
コースは当日公開
・昨年に引き続き、走行コースは当日公開としました。
・選手は受付後にコースを見て、開会式までに調整を行い、タイムトライアルに挑みます。定められた時間にどれだけ調整ができるかが見所です。
競技ルール
①コースは当日公開
②予備戦は、タイムトライアル方式で順位を決め、本選の対戦順を決定
③本選はトーナメント方式
④一度ラインアウトや逆走しても、制限時間以内にライン上に戻れば継続可能
⑤ロボットが完全に脱線した場合、停止した場合は失敗とみなし終了
ライントレース部門 結果発表

優勝
優勝


愛知県 国府教室 戸田 有哉さん(中3)
東京都 東陽町教室 中島 智畝さん(中3)
今年のライントレース部門決勝は、白熱した戦いが繰り広げられ、なんと同着!
審判の目検では判断できないほどの接戦だったため、100分の1秒を記録できる動画を活用した判定により、大会史上初の同着優勝となりました!
戸田さん 作品のポイント
マシンの名前は『もみじ』です。
特徴はセンサが色を読みやすくするために限界まで地面に近づけ、車体の前方に突き出たデザインにしたことです。また、走行を安定させるため、重たいモーターを車体の下側に取り付け、重心が低くなるようにして、軽量化するため、3輪タイプのマシンにしました。
中島さん 作品のポイント
今回はwhile文というプログラム文を用いて、コースを分割して考えるようにしました。
それと同時にswitch case文も使いプログラムを軽くし、コースのどこを走らせても最高のパフォーマンスで走行できるようにしました。また、去年と同じくオムニホイールを取り付ける角度に工夫をし、直線では若干スピードは劣りますが、その分カーブではスムーズかつ素早く曲がることができるようになりました。
古田先生のコメント
当日の走行環境に合わせてパラメータを調整したり、臨機応変に対応していて驚きました。素晴らしい才能です!

3位
3位
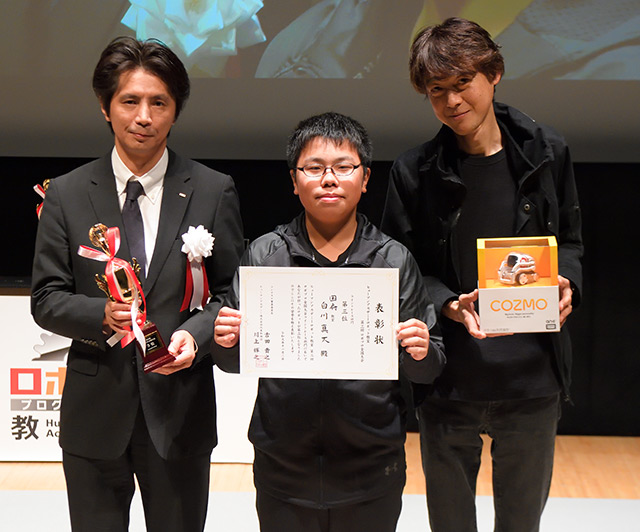
愛知県 国府教室 白川 真大さん(中2)
作品のポイント
マシンの名前は『スピーダー』です。
特長は、マシンに円形ボードを採用し、後輪を外に取り付けることで旋回性を向上させたことです。
旋回性を向上させたことにより、直進時のスピードを上げることができるようなりました。
また、去年の経験からカラーセンサーを固定するバーを2本とし、折れにくく、ブレにくくする工夫もしました。